Robotic Navigation via 6G Wireless Sensing and AoA Estimation (2025)
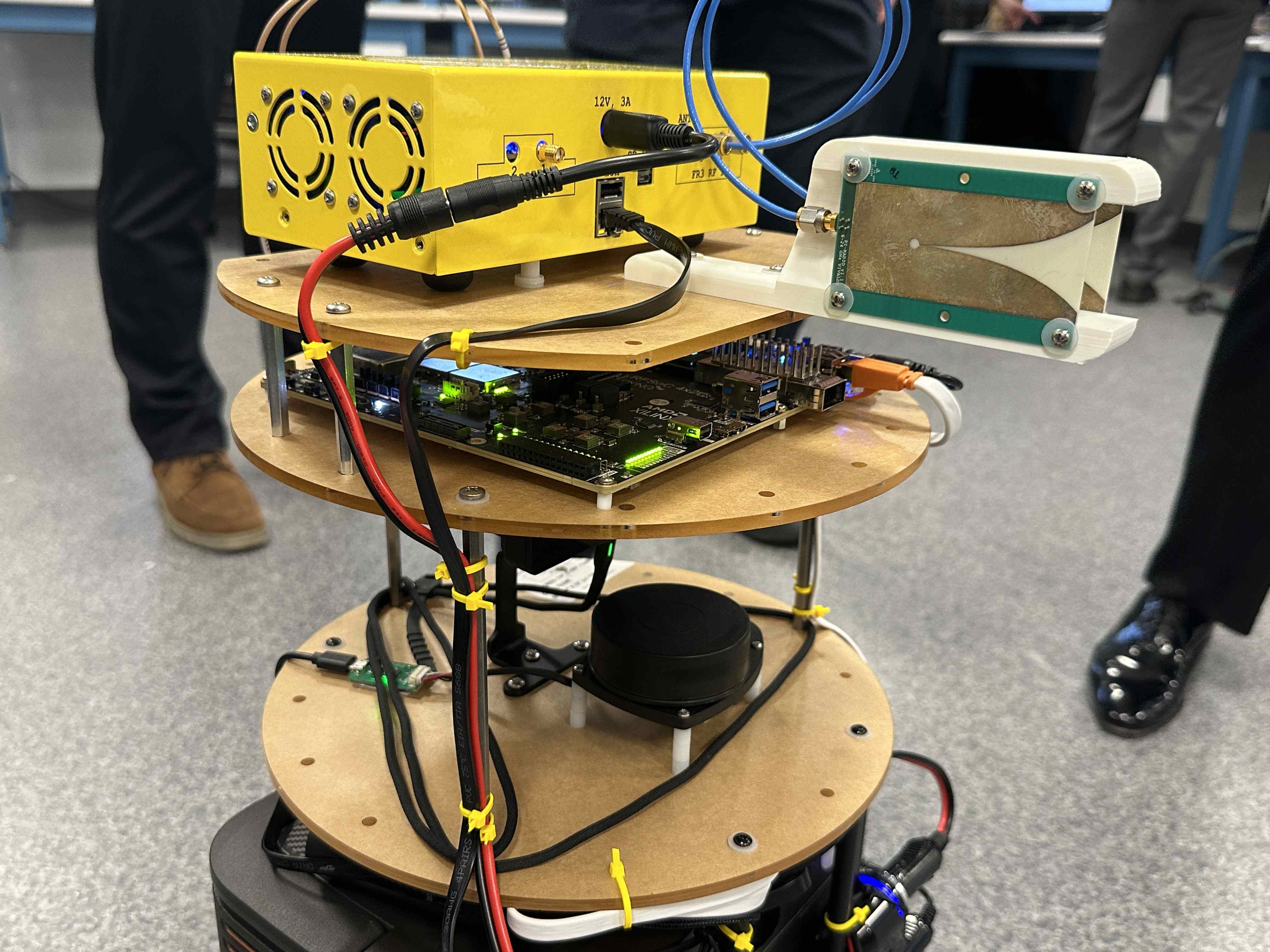
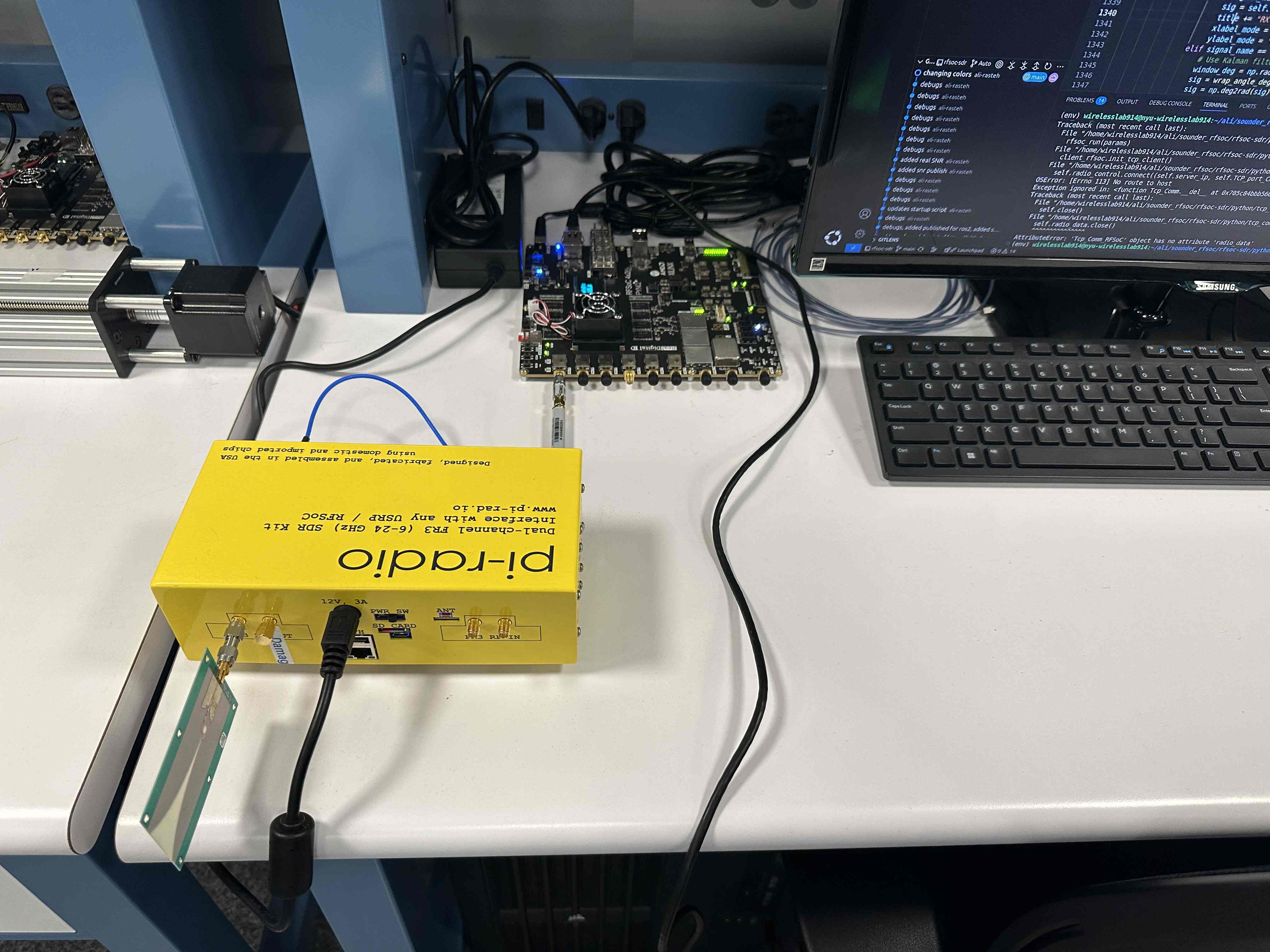
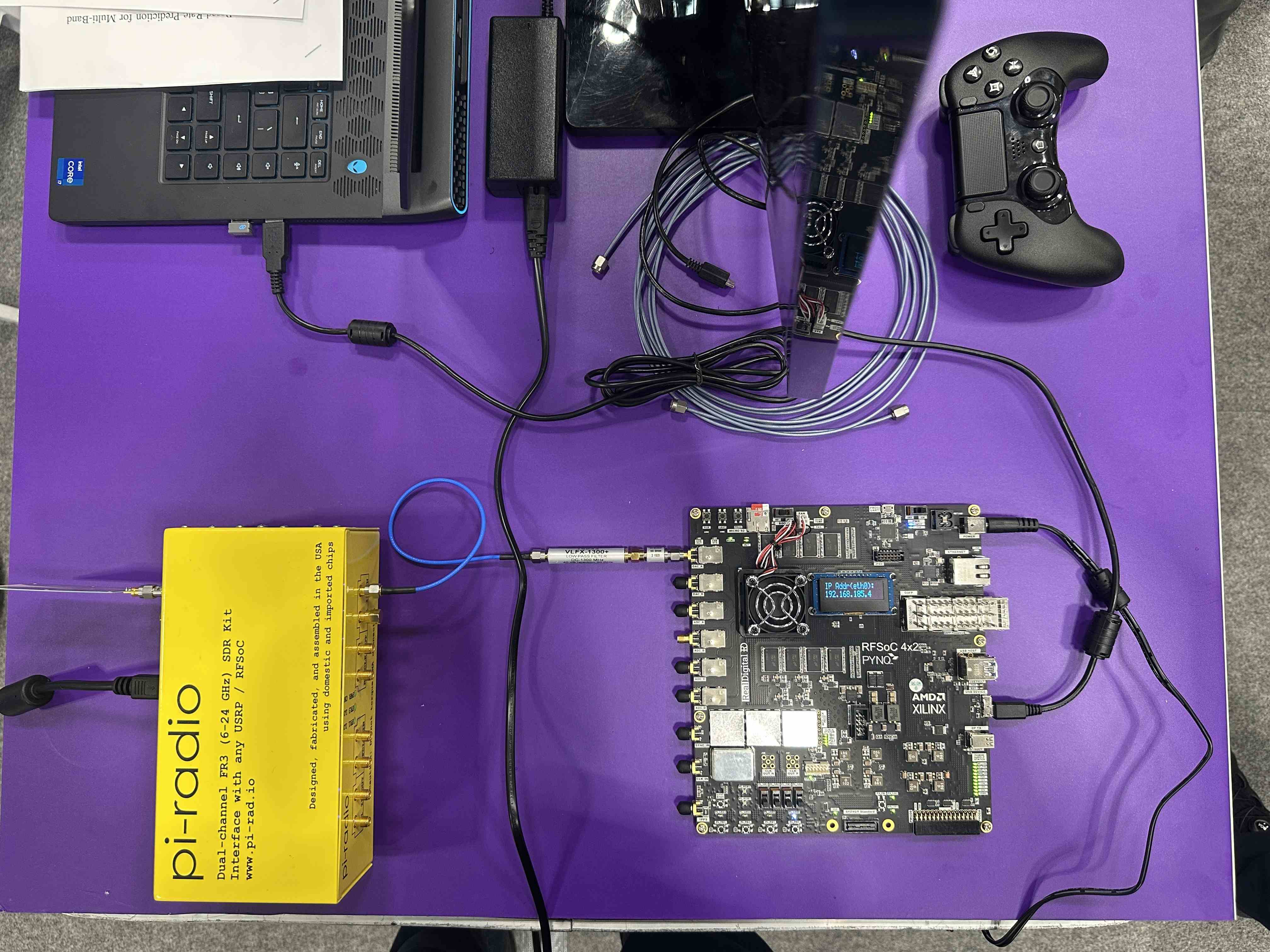
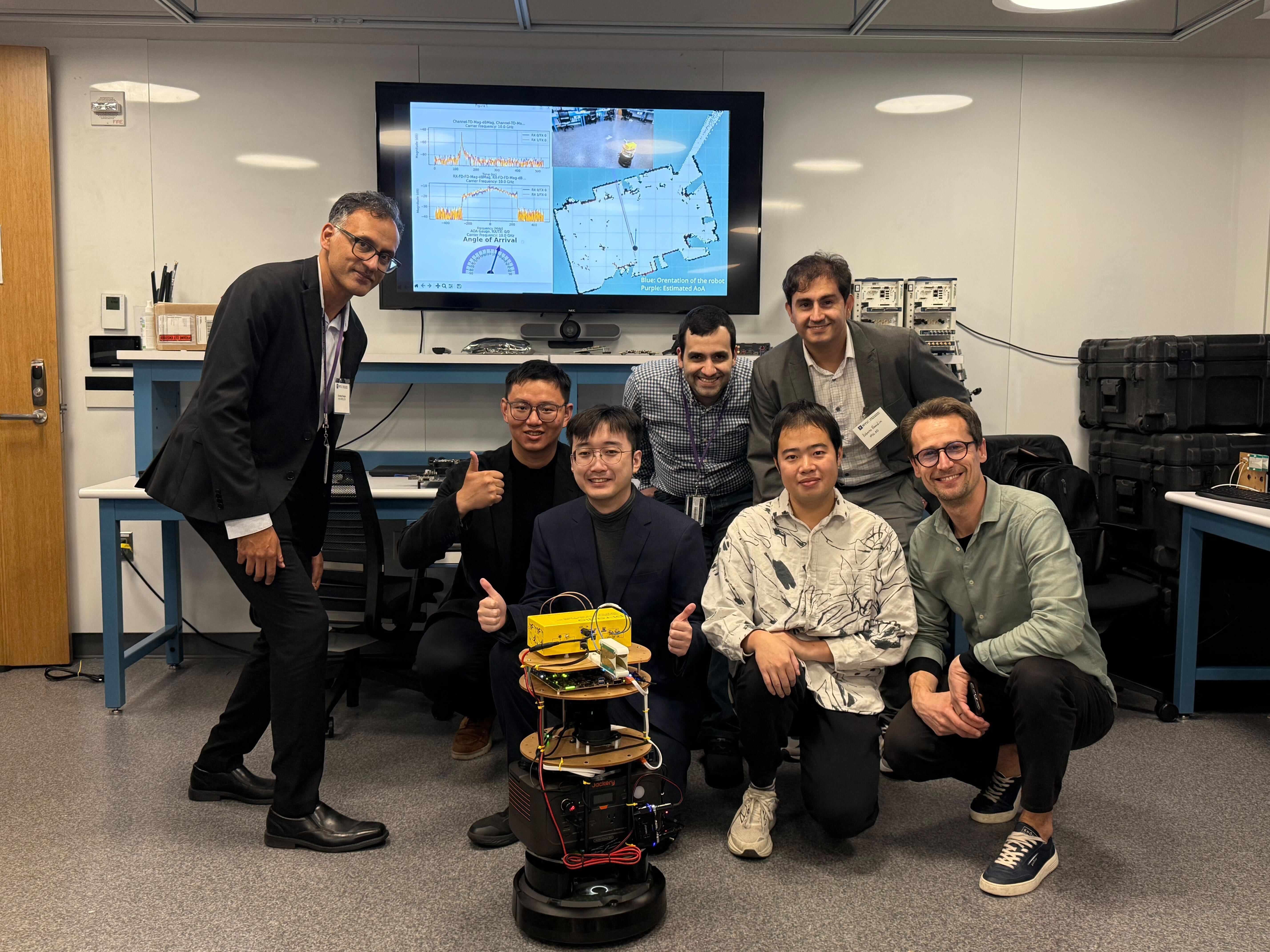
This project demonstrates an autonomous robotic system that can perceive and interpret its wireless environment using 6G-relevant sensing techniques. The robot detects the Angle of Arrival (AoA) of a FR3 wireless transmitter, navigates toward the signal source, and localizes it through triangulation. All sensing and navigation results are visualized in real time on a LiDAR-generated map. The system integrates spatial signal processing with robotic navigation, illustrating how future 6G technologies can enable devices to move beyond communication into environmental awareness and adaptive intelligence. By fusing wireless sensing with autonomy, the project highlights a paradigm where robots can reason about invisible RF signals as part of their perception stack. This work was presented at the Nokia / NYU Brooklyn 6G Summit and reflects a collaborative effort at the intersection of wireless communications, hardware acceleration, and autonomous robotics.
Our Work Album (Click to see all images)