Robot Localization and Navigation (IMU-Vicon Fusion) (2024)
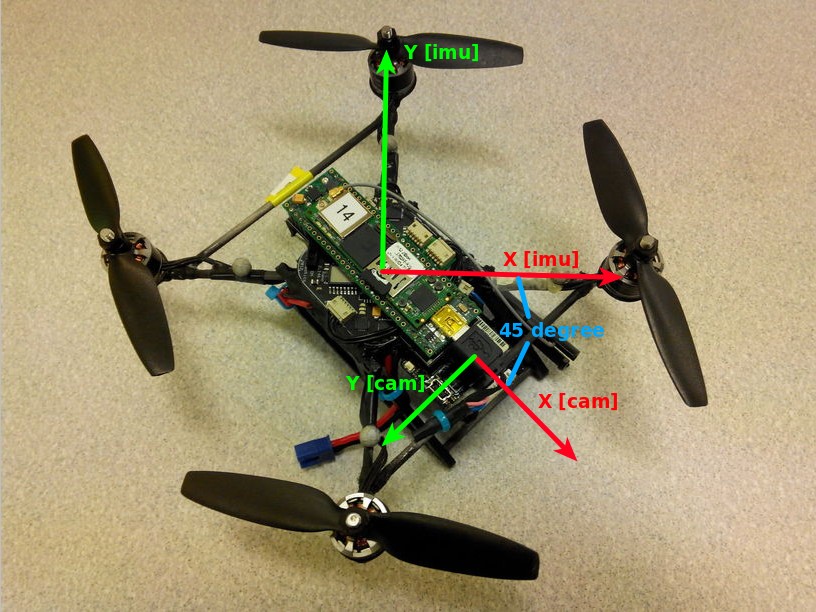
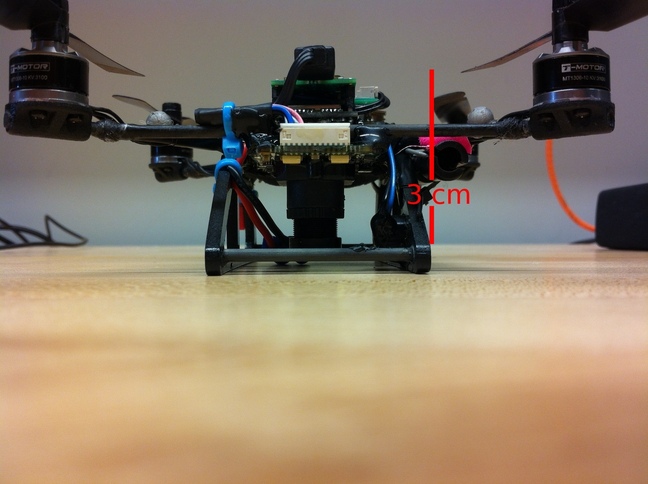
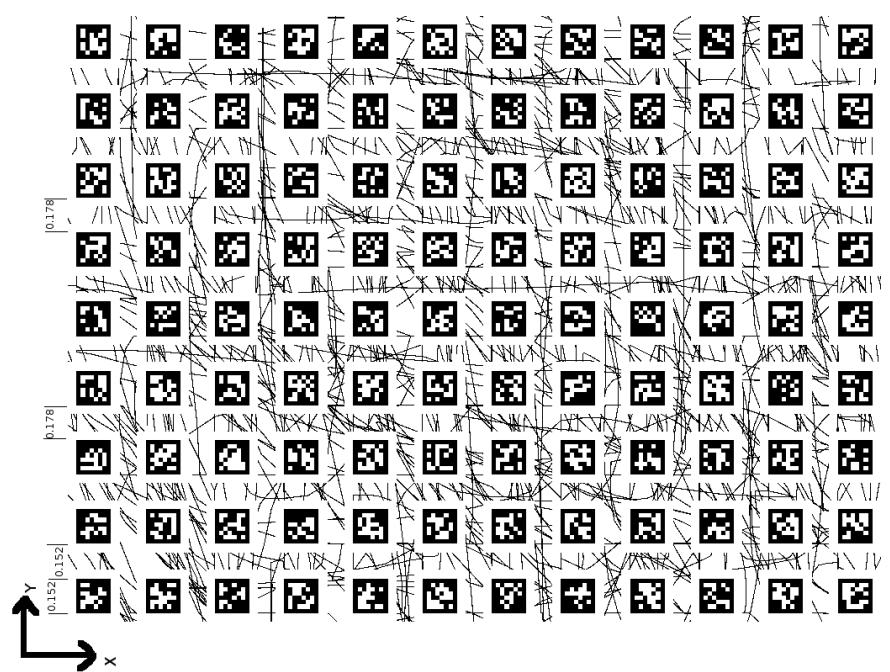
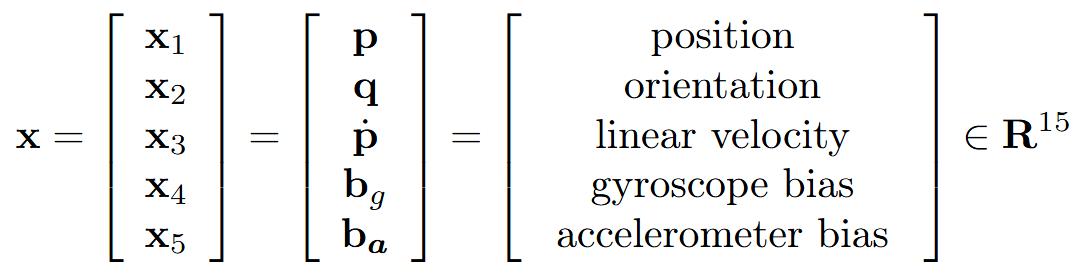
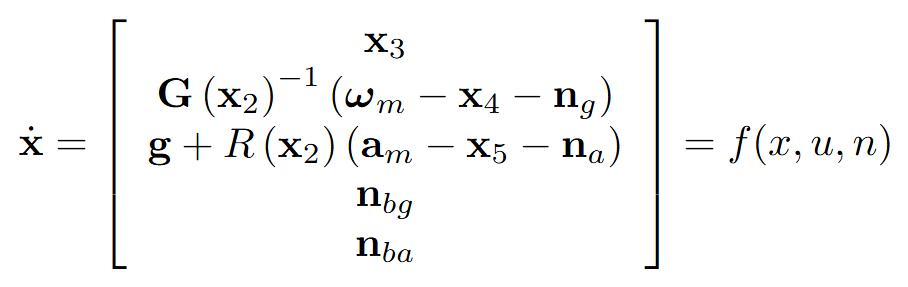
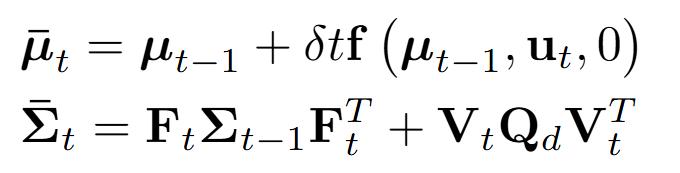
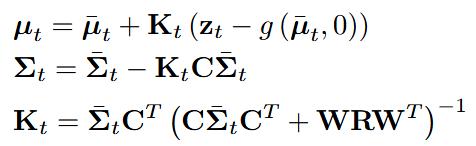
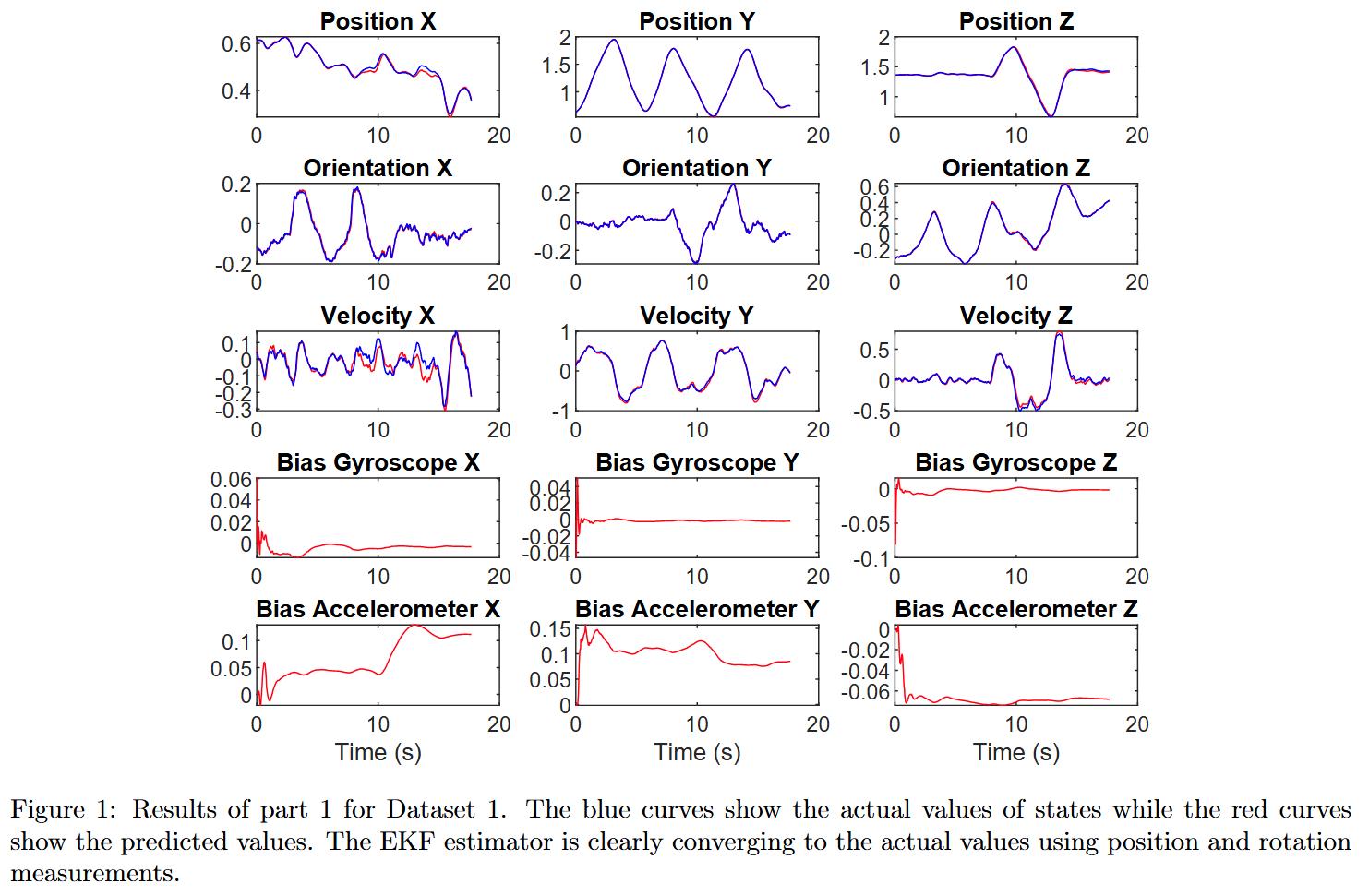
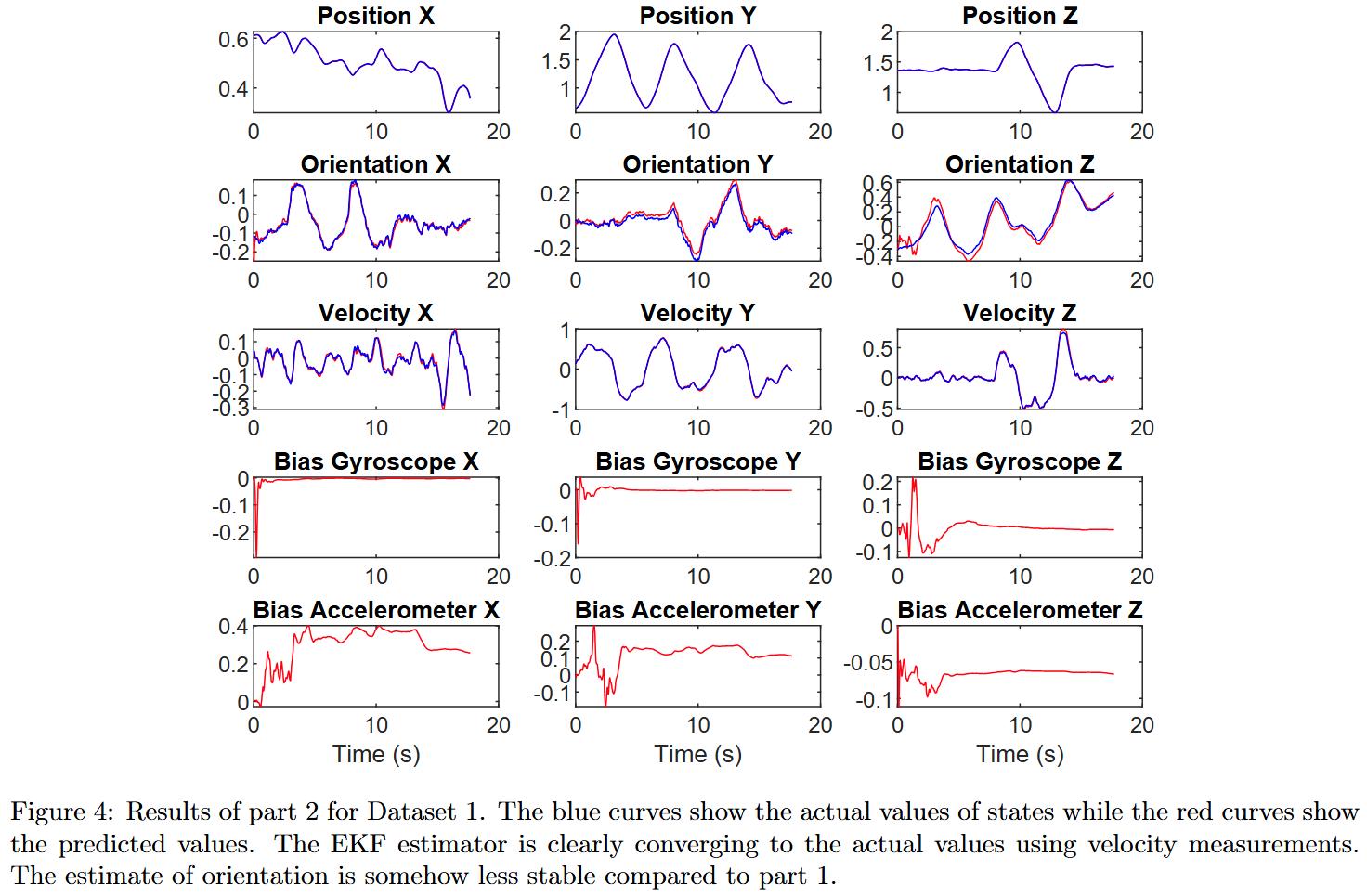
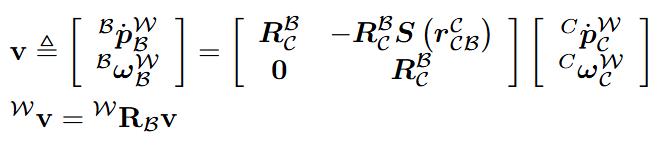
in this project I developed a localization and navigation system for a drone using a combination of vision-based AprilTag tracking and IMU data. The system was implemented using both an Extended Kalman Filter (EKF) and an Unscented Kalman Filter (UKF) to fuse pose and velocity measurements from the camera and IMU. Results demonstrated accurate state estimation and successful sensor fusion.
Our Work Album (Click to see all images)